Deriving the Acoustic Wave Equation
FOREWORD
While this is a derivation involving somewhat involved maths and physical concepts, I have purposefully made it quite “verbose” and explanatory in nature. Hopefully (if you are at least at the undergraduate physics level), there should not be too many stumbling points and should make logical progression without large leaps of faith. As such, I wouldn’t call it a compact derivation or post.
Why Waves?
We are so used to describing sounds as “waves”, or referring to implied realisations of sound as a wave (frequency/amplitude/phase), the actual physics is sometimes overlooked or forgotten. The question “why waves?” can be answered (either completely, or completely unsatisfying-ly) by “it satisfies the wave equation”. Starting from a few simple assumptions, we’ll build a mathematical description of the way sound propagates, which you will hopefully recognise as a wave equation. To cover the most interesting and applicable cases, we’ll concentrate on sound propagating in gaseous mediums (sorry hydro-acoustics).
Properties of the Medium
Conceptually, gases are a collection of atoms/molecules which travel quite fast, bouncing off each other and boundaries. We may have some expectation for information (sound/disturbances) to be able to “travel” through the gas as particles bounce off one another, but may not be sure of the exact form which information travels. To build the technical understanding, we need to need to be comfortable with describing some macro properties of the gas, particularly pressure 

We can pose some base assumptions, without too much in depth consideration
- Gas particles move, and as they do the density of the gas changes (more particles in a given volume gives a higher density and vice versa),
- Pressure changes with some relation to this density change (higher density, more particle collisions, higher pressure, and vice versa),
- Pressure gradients cause gas particles to move (particles tend to move from regions of higher pressure to lower pressure).
From these assumptions, we can see that for a given disturbance there is already a cyclic cause and effect emerging. Assumption 1, leads to 2, leads to 3, leads back to 1 and so on.
Equilibrium
Starting with an “undisturbed” gas, seems a bit of a problem, as the particles are naturally moving, colliding and interacting with seemingly random conditions all the time. We can however talk about a gas in a state of equilibrium, where pressure and density are consistent throughout the medium. From here, we can also define the acoustic pressure as the “excess” pressure above equilibrium, and similarly for density:


Another condition falls out of this; since total pressure cannot be negative, 
Pressure and Density
In Assumption 2, we posited that pressure changes “in some relation” to density. Lets formalise this using some function, 

The linearisation only holds for small deviations around the expansion point.
Taking the expansion around the equilibrium density yields

Where 

Displacement and Density
To formalise Assumption 1, consider the displacement of gas at a time and location in space 

For a visual reference, Figure 1 shows a collection of gas particles at equilibrium (1,2), and when disturbed by a sound wave arriving from the left (3,4).
At equilibrium, the gas particles at 




![\begin{aligned}V_0=& A \left[ \left( x +\Delta x\right) - x \right] \\ =& A \Delta x \\ \implies m_0 =& \rho_0 A \Delta x \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7DV_0%3D%26+A+%5Cleft%5B+%5Cleft%28+x+%2B%5CDelta+x%5Cright%29+-+x+%5Cright%5D+%5C%5C+%3D%26+A+%5CDelta+x+%5C%5C+%5Cimplies+m_0+%3D%26%C2%A0+%5Crho_0+A+%5CDelta+x+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
When disturbed by movement, the particles at 


![\begin{aligned}V=& A\left[ \left(x +\Delta x + \chi \left(x +\Delta x \right)\right) - \left(x + \chi \left( x, t \right)\right)\right] \\ =& A\left[ \Delta x + \chi \left(x +\Delta x \right) - \chi \left( x, t \right)\right] \\ \implies m =& \rho A \left[\Delta x + \chi \left(x +\Delta x \right) - \chi \left( x, t \right)\right] \end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7DV%3D%26+A%5Cleft%5B+%5Cleft%28x+%2B%5CDelta+x+%2B+%5Cchi+%5Cleft%28x+%2B%5CDelta+x+%5Cright%29%5Cright%29+-+%5Cleft%28x+%2B+%5Cchi+%5Cleft%28+x%2C+t+%5Cright%29%5Cright%29%5Cright%5D+%5C%5C+%3D%26+A%5Cleft%5B+%5CDelta+x+%2B+%5Cchi+%5Cleft%28x+%2B%5CDelta+x+%5Cright%29+-%C2%A0%5Cchi+%5Cleft%28+x%2C+t+%5Cright%29%5Cright%5D+%5C%5C+%5Cimplies+m+%3D%26%C2%A0+%5Crho+A+%5Cleft%5B%5CDelta+x+%2B+%5Cchi+%5Cleft%28x+%2B%5CDelta+x+%5Cright%29+-%C2%A0%5Cchi+%5Cleft%28+x%2C+t+%5Cright%29%5Cright%5D+%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
Now, we can argue the mass of gas (or number of particles) must not change (notice between Figure 1 (1,2) and (3,4) the number of particles in the volume does not change), thus 
![\begin{aligned} m_0 =& m \\ \rho_0 A \Delta x =& \rho A \left[\Delta x + \chi \left(x +\Delta x \right) - \chi \left( x, t \right)\right] \\ \rho_0 \Delta x=&\rho \left[\Delta x + \frac{\partial \chi }{\partial x}\Delta x\right] \\ \rho_0 =& \rho \left[1 + \frac{\partial \chi }{\partial x}\right] \\=& \left(\rho_0 + \rho_{acoustic}\right) \left[1 + \frac{\partial \chi }{\partial x}\right]\\=& \left(\rho_0 + \rho_{acoustic}\right) \frac{\partial \chi }{\partial x} +\rho_0 + \rho_{acoustic} \\ \implies \rho_{acoustic} =&-\rho_0 \frac{\partial \chi }{\partial x} - \rho_{acoustic} \frac{\partial \chi }{\partial x} \\ =& -\rho_0 \frac{\partial \chi }{\partial x}\ \ \ \ \ \mathbf{\left(I\right)}\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D%C2%A0m_0+%3D%26+m+%5C%5C%C2%A0%5Crho_0+A+%5CDelta+x+%3D%26%C2%A0%5Crho+A+%5Cleft%5B%5CDelta+x+%2B+%5Cchi+%5Cleft%28x+%2B%5CDelta+x+%5Cright%29+-%C2%A0%5Cchi+%5Cleft%28+x%2C+t+%5Cright%29%5Cright%5D+%5C%5C+%5Crho_0%C2%A0+%5CDelta+x%3D%26%5Crho+%5Cleft%5B%5CDelta+x+%2B+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D%5CDelta+x%5Cright%5D+%5C%5C+%5Crho_0+%3D%26+%5Crho+%5Cleft%5B1+%2B+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D%5Cright%5D+%5C%5C%3D%26+%5Cleft%28%5Crho_0+%2B+%5Crho_%7Bacoustic%7D%5Cright%29+%5Cleft%5B1+%2B+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D%5Cright%5D%5C%5C%3D%26+%5Cleft%28%5Crho_0+%2B+%5Crho_%7Bacoustic%7D%5Cright%29+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D+%2B%5Crho_0+%2B+%5Crho_%7Bacoustic%7D+%5C%5C+%5Cimplies+%5Crho_%7Bacoustic%7D+%3D%26-%5Crho_0+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D+-+%5Crho_%7Bacoustic%7D+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D+%5C%5C+%3D%26+-%5Crho_0+%5Cfrac%7B%5Cpartial+%5Cchi+%7D%7B%5Cpartial+x%7D%5C+%5C+%5C+%5C+%5C%C2%A0+%5Cmathbf%7B%5Cleft%28I%5Cright%29%7D%5Cend%7Baligned%7D&bg=ffffff&fg=000&s=0&c=20201002)
We’ve used a slightly altered approximation for the partial derivative of 

Figure 1 – Gas particles at equilibrium and when disturbed.

Displacement and Pressure
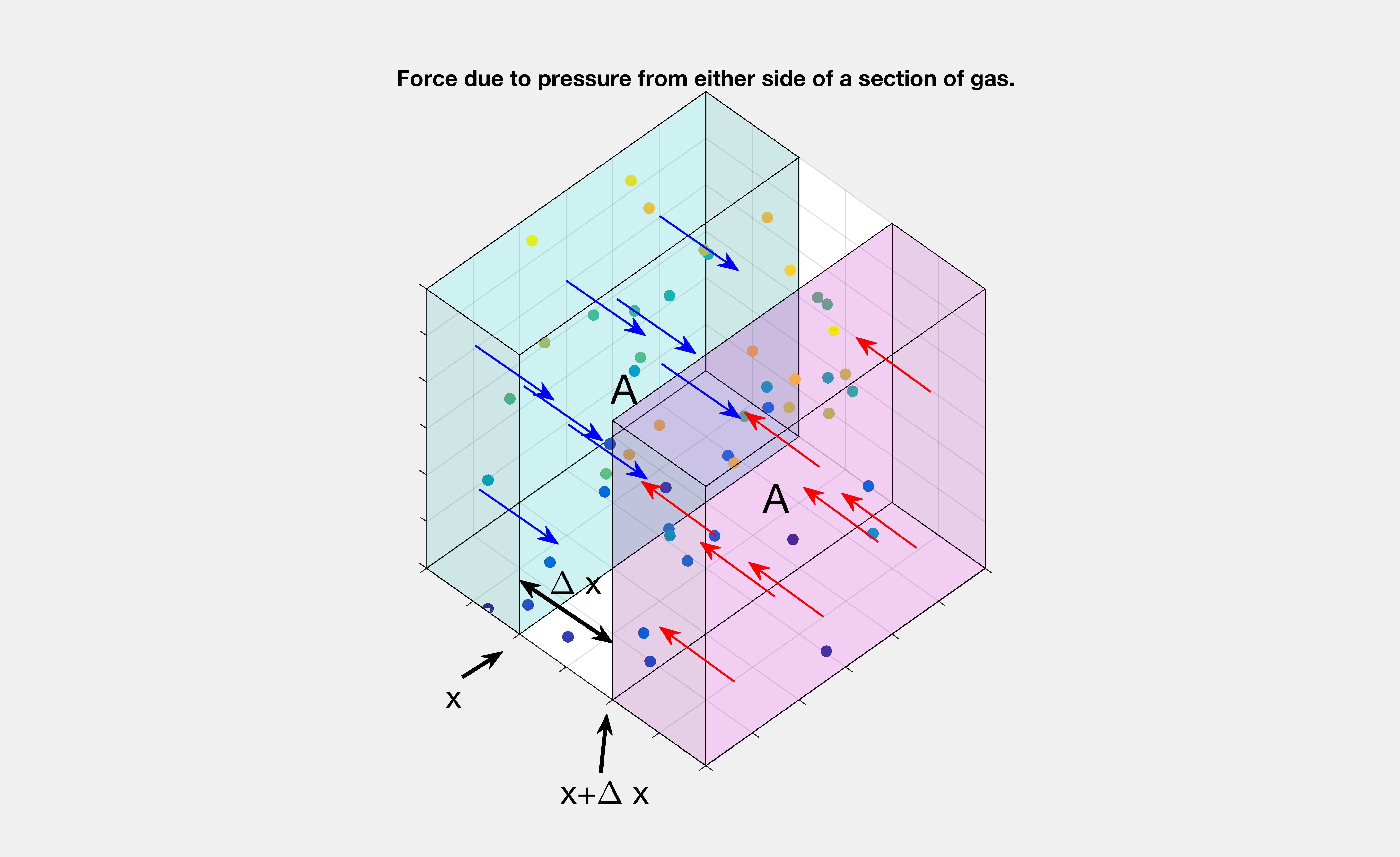
Working now with Assumption 3, and taking a similar approach to the previous section. A thin section of air at equilibrium has mass 

To find the forces acting on this section of gas, consider the pressures (force per unit area) at the “left” side , which would be given by 

So the total force on the section is

where the partial derivative is found using the same approximation as in the last section.
Putting this with the previous equation we have

We simplified the partial derivative of 

Figure 2 – Force and Pressure on a Section of Gas.

Putting it all Together
With the mathematically formalised versions of our 3 assumptions, we can combine them and eliminate some variables.
First, using 

Substituting into 

Similarly taking the partial derivative of 

Which is (finally) our beloved wave equation for particle displacement, with the speed of the wave 
Summary
There is unfortunately a lot that we’ll leave at face value here (What makes this a wave equation equation? What about pressure? What about sound in three dimensions?), but that’s probably enough for this post. The main goal of introducing this derivation is to:
- Show how the formalisation a few simple physical assumptions can lead to a useful result,
- Show that sound will indeed propagate as waves,
- Introduce the wave equation.
The wave equation is so important because it is an exact mathematical description of how sound propagates and evolves. Any situation could be modelled using this. Sound indoors, outdoors, barriers, absorption, diffusion, reflections, transmissions, high frequency, low frequency. It’s all covered. But, PDE’s are messy and hard. They have analytical solutions in only the simplest of cases, and computational models have their own limitations. Hence we introduce other potential solution methods such as ray acoustics, source/propagation simplifications, spectral and pseudo-spectral models, empirical models and even physical scale models to assist in solving specific problems.
References
This derivation follows the methods used by Feynman, found here. Feynman’s methodology is wonderfully conceptual and is build from minimal assumptions. There are many alternate approaches (such as starting with the ideal gas law).
All figures are original.